rov 3d rovによる水中調査title 水中3dスキャナー搭載rovによる水中調査 author...
TRANSCRIPT

2018.9
人と地球の未来のために
https://ideacon.jp/
〒154-8585 東京都世田谷区駒沢3-15-1
〒224-0025 神奈川県横浜市都筑区早渕2-2-2
〒421-0212 静岡県焼津市利右衛門1334-5
〒559-8519 大阪府大阪市住之江区南港北1-24-22
〒905-1631 沖縄県名護市字屋我252
〒559-8519 大阪府大阪市住之江区南港北1-24-22
〒900-0003 沖縄県那覇市安謝 2-6-19
札幌・東北・福島・北陸・名古屋・中国・四国・九州
TEL:03-4544-7600
TEL:045-593-7600
TEL:054-622-9551
TEL:06-7659-2803
TEL:0980-52-8588
TEL:06-4703-2800
TEL:098-868-8884
本 社
国 土 環 境 研 究 所
環 境 創 造 研 究 所
食品・生命科学研究所
亜 熱 帯 環 境 研 究 所
大 阪 支 社
沖 縄 支 社
支 店
船舶搭載状況 ROV投入・回収状況
船外機による調査状況 水中移動状況
誘導画面コントロールユニット
ROV調査状況自然環境の保全・再生・創造
環境リスクの評価・管理
環境の現象解析・影響評価
Environment
海洋生物調査から構造物の水中詳細測量まで
Environment
国土交通省による「次世代社会インフラ用ロボット開発・導入の推進」において、
水中維持管理部門の実証試験に参加し、要素技術として選定されました。
この技術は、CIM(Construction Information Modeling)への活用等、
効率的な維持管理への活用が期待されます。
当社のROV(SeaROVER:TELEDYNE BENTHOS社製)は、小型で軽量ながらパワフルな運動性能を有し、拡張性の
高いオープンフレーム構造で汎用性も高く、小型船での調査が可能です。
また、水中3Dスキャナ(BV5000:TELEDYNE BlueView社製)を搭載しており、水中地形や構造物、魚群の形状
等を、詳細に3次元測量することが可能です。取得した点群データは、海底地形測量データ等と重ね合わせ
ることができます。
ROVによる水中調査ROVによる水中調査
ダム堤体高位洪水吐
水中3Dスキャナ搭載水中3Dスキャナ搭載
環 境
国土交通省
「次世代社会インフラ用ロボット開発・導入の推進:水中維持管理分野」実証試験に参加
測量箇所高位洪水吐
NETIS 登録番号 KT-180031-A 技術名称 : 水中 3D スキャナーによる水中構造物の形状把握システム「 i - UVS ( I n t e l l i g e n t - U n d e rw a t e r V i s u a l i z a t i o n S y s t em ) 」
ROV(Remotely Operated Vehicle)
・海洋生物調査および 各種モニタリング調査
・魚礁等の蝟集量調査
・海洋港湾構造物およびダムや 暗渠等の水中維持管理調査
・構造物の水中詳細測量
・海洋再生可能エネルギー調査
・海洋資源調査
・パイプラインやケーブルルート 調査
・水中遺跡調査
・水中捜索
活用例
操縦性
最高速度
スラスター
耐圧
寸法および重量
テザーケーブル
カメラ
ライト
センサ
測位装置
電力
オプション
4軸移動
3ノット(約5km/h)
4基(水平2基、鉛直1基、側面1基)
300m
L75×W60×H57cm / 75kg
100mケーブル、450mウィンチ付きケーブル
高解像度カラービデオ2機(前面、後面)
高解像度モノクロビデオ1機(前面)
外付ハイビジョンカメラ
LEDライト:標準700ルーメン、外付5000ルーメン
全周囲2Dソナー(Tritech)
全周囲3Dスキャナ(BV5000 1.35MHz)
BV5000:最大計測距離30m、ビーム幅1°×1°、ビーム数256本
USBL方式トランスポンダー
緊急用ピンガー
130VAC、単相
マニピュレータ
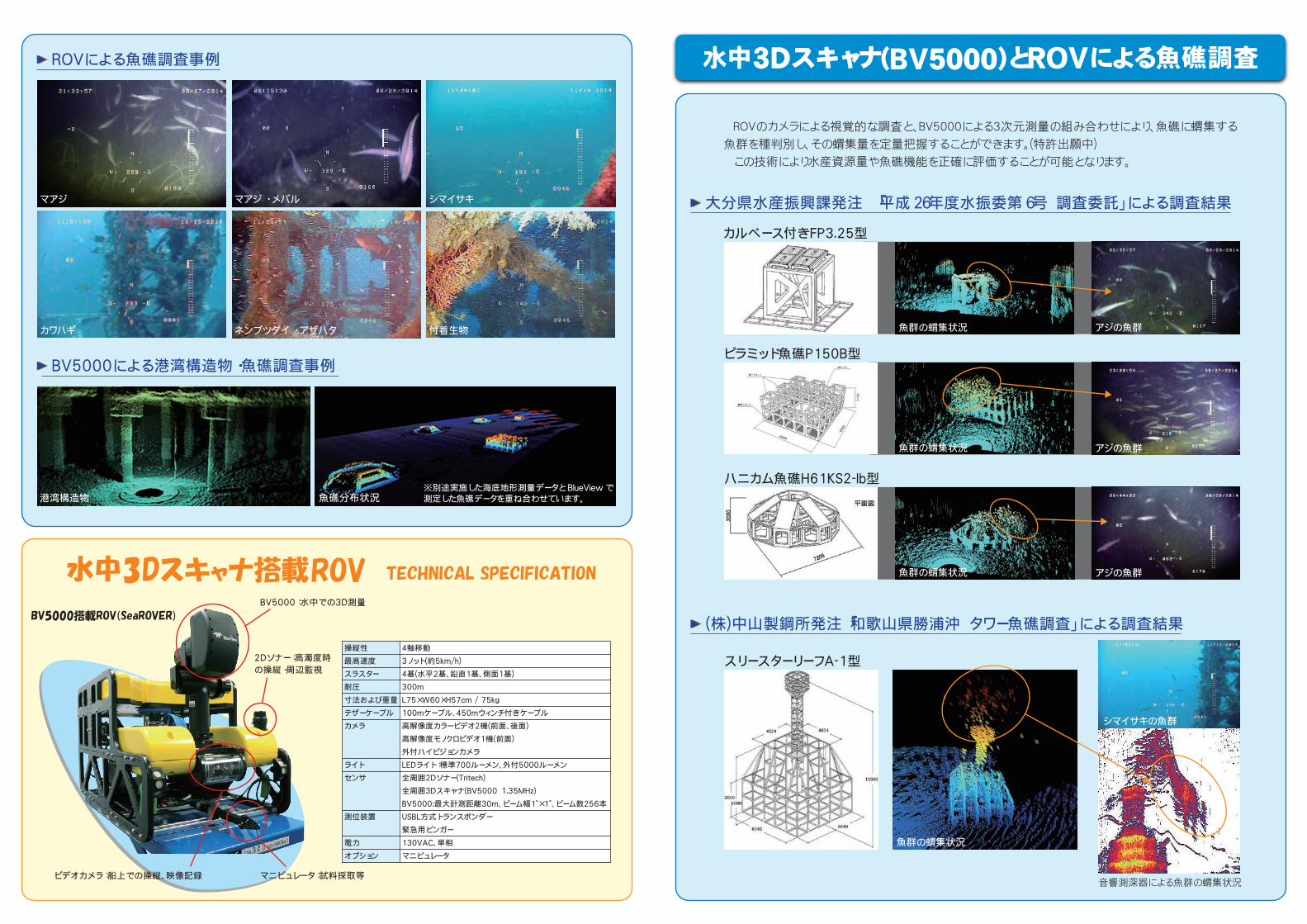
ROVによる魚礁調査事例
BV5000による港湾構造物・魚礁調査事例
マアジ ・ メバルマアジ シマイサキ
カワハギ ネンブツダイ ・ アザハタ 付着生物
港湾構造物 魚礁分布状況※別途実施した海底地形測量データと BlueView で測定した魚礁データを重ね合わせています。
水中3Dスキャナ搭載ROV TECHNICAL SPECIFICATION
BV5000:水中での3D測量
マニピュレータ:試料採取等
2Dソナー:高濁度時
の操縦・周辺監視
ビデオカメラ:船上での操縦、映像記録
BV5000搭載ROV(SeaROVER)
大分県水産振興課発注 「平成26年度水振委第6号 調査委託」による調査結果
(株)中山製鋼所発注「和歌山県勝浦沖 タワー魚礁調査」による調査結果
音響測深器による魚群の蝟集状況
スリースターリーフA-1型
水中3Dスキャナ(BV5000)とROVによる魚礁調査
ROVのカメラによる視覚的な調査と、BV5000による3次元測量の組み合わせにより、魚礁に蝟集する
魚群を種判別し、その蝟集量を定量把握することができます。(特許出願中)
この技術により水産資源量や魚礁機能を正確に評価することが可能となります。
魚群の蝟集状況
シマイサキの魚群
カルベース付きFP3.25型
ピラミッド魚礁P150B型
ハニカム魚礁H61KS2-lb型
魚群の蝟集状況
魚群の蝟集状況
魚群の蝟集状況
アジの魚群
アジの魚群
アジの魚群