kontrol pid kecepatan putaran motor dc
TRANSCRIPT
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 1/12
KONTROL PID KECEPATAN PUTARAN MOTOR DCArie Eric Rawung
Abstrak:
Teknik kontrol berkaitan dengan pemahaman dan pengontrolan bahan dankekuatan alam untuk kepentingan umat manusia. Tujuan ganda pemahaman danpengontrolan, saling melengkapi karena sistem kontrol yang efektif mensyaratkanbahwa sistem dapat dipahami dan dimodelkan. Tantangan saat ini untuk pengontrolanadalah pemodelan dan pengontrolan modern, kompleks, sistem yang saling terkaitseperti sistem kontrol lalu lintas, proses kimia, dan sistem robot. Teknik kontroldidasarkan pada dasar-dasar teori umpan balik dan analisis sistem linear, danmengintegrasikan konsep-konsep teori model matematika plant dan teori kontrol PID.
leh karena itu teknik kontrol dapat digunakan untuk memperbaiki respon sistem platorde dua !yang memiliki overshoot dan peredaman yang besar" menjadi respon sistemorde satu yang diinginkan tanpa overshoot dan transien respon yang #epat.Perbaikanini dilakukan dengan menggunakan kontrol PID, dimana penetapan parameter-parameter kontrol PID melalui rangkaian sistem tertutup antara kontroler PID dan plant .
$ata kun#i: Plant, Kontrol, PID
1.Teknik Kontrol
%ebuah sistem kontrol adalah sebuah interkoneksi dari komponen membentuk
konfigurasi sistem yang akan memberikan respon sistem yang diinginkan. Dasar
analisis sistem adalah dasar yang disediakan oleh teori sistem linear, yang
mengasumsikan hubungan sebab-akibat untuk komponen sistem. leh karena itu
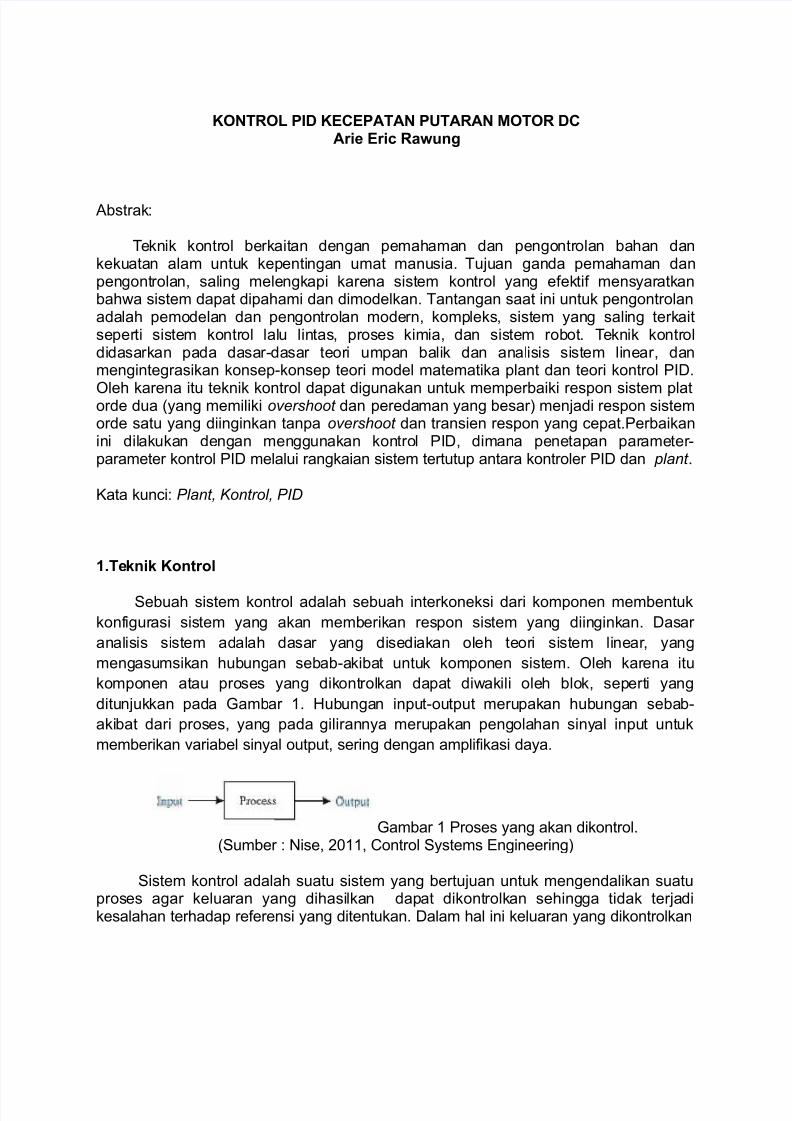
komponen atau proses yang dikontrolkan dapat diwakili oleh blok, seperti yang
ditunjukkan pada &ambar '. (ubungan input-output merupakan hubungan sebab-
akibat dari proses, yang pada gilirannya merupakan pengolahan sinyal input untuk
memberikan )ariabel sinyal output, sering dengan amplifikasi daya.
&ambar ' Proses yang akan dikontrol.!%umber : *ise, +'', ontrol %ystems ngineering"
%istem kontrol adalah suatu sistem yang bertujuan untuk mengendalikan suatuproses agar keluaran yang dihasilkan dapat dikontrolkan sehingga tidak terjadikesalahan terhadap referensi yang ditentukan. Dalam hal ini keluaran yang dikontrolkan
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 2/12
adalah kestabilan, ketelitian dan kedinamisannya. %e#ara umum sistem kontrol dapatdibagi menjadi + jenis yaitu sistem kontrol rangkaian terbuka dan rangkaian tertutup.
1.1 Site! Kontrol Rangkaian Ter"uka
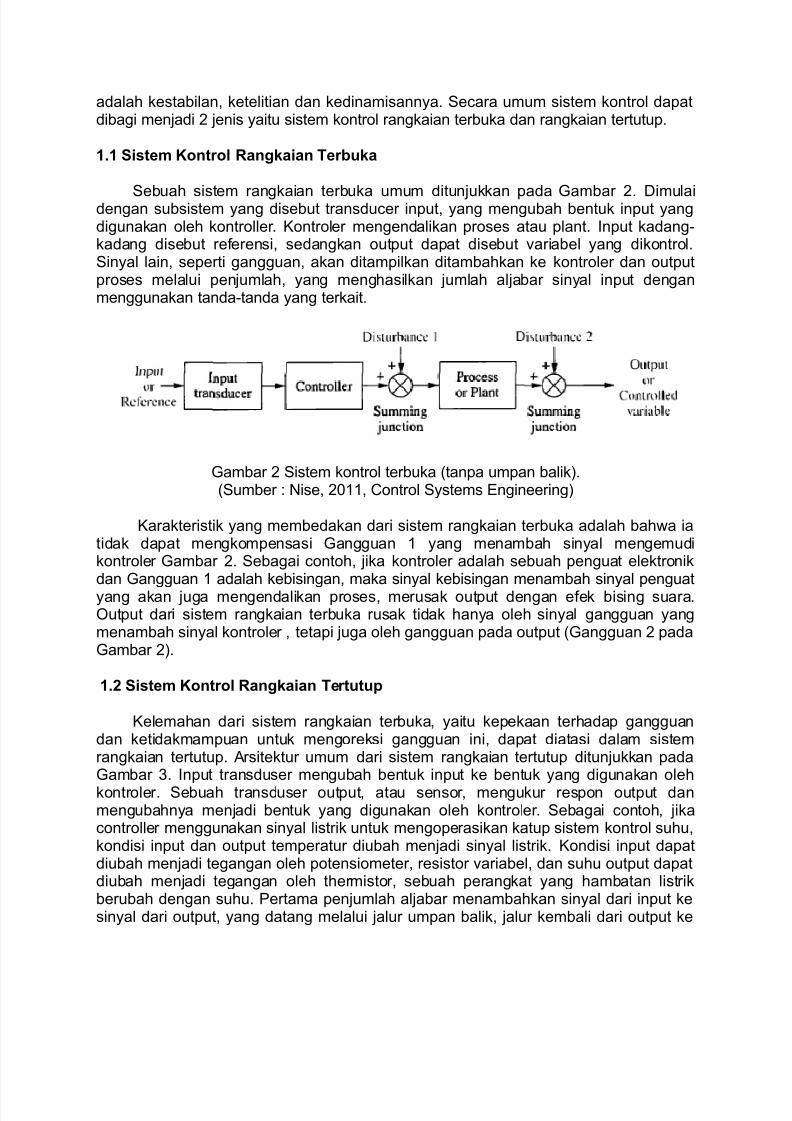
%ebuah sistem rangkaian terbuka umum ditunjukkan pada &ambar +. Dimulaidengan subsistem yang disebut transdu#er input, yang mengubah bentuk input yangdigunakan oleh kontroller. $ontroler mengendalikan proses atau plant. Input kadang-kadang disebut referensi, sedangkan output dapat disebut )ariabel yang dikontrol.%inyal lain, seperti gangguan, akan ditampilkan ditambahkan ke kontroler dan outputproses melalui penjumlah, yang menghasilkan jumlah aljabar sinyal input denganmenggunakan tanda-tanda yang terkait.
&ambar + %istem kontrol terbuka !tanpa umpan balik".!%umber : *ise, +'', ontrol %ystems ngineering"
$arakteristik yang membedakan dari sistem rangkaian terbuka adalah bahwa iatidak dapat mengkompensasi &angguan ' yang menambah sinyal mengemudikontroler &ambar +. %ebagai #ontoh, jika kontroler adalah sebuah penguat elektronikdan &angguan ' adalah kebisingan, maka sinyal kebisingan menambah sinyal penguatyang akan juga mengendalikan proses, merusak output dengan efek bising suara.utput dari sistem rangkaian terbuka rusak tidak hanya oleh sinyal gangguan yangmenambah sinyal kontroler , tetapi juga oleh gangguan pada output !&angguan + pada&ambar +".
1.# Site! Kontrol Rangkaian Tertutu$
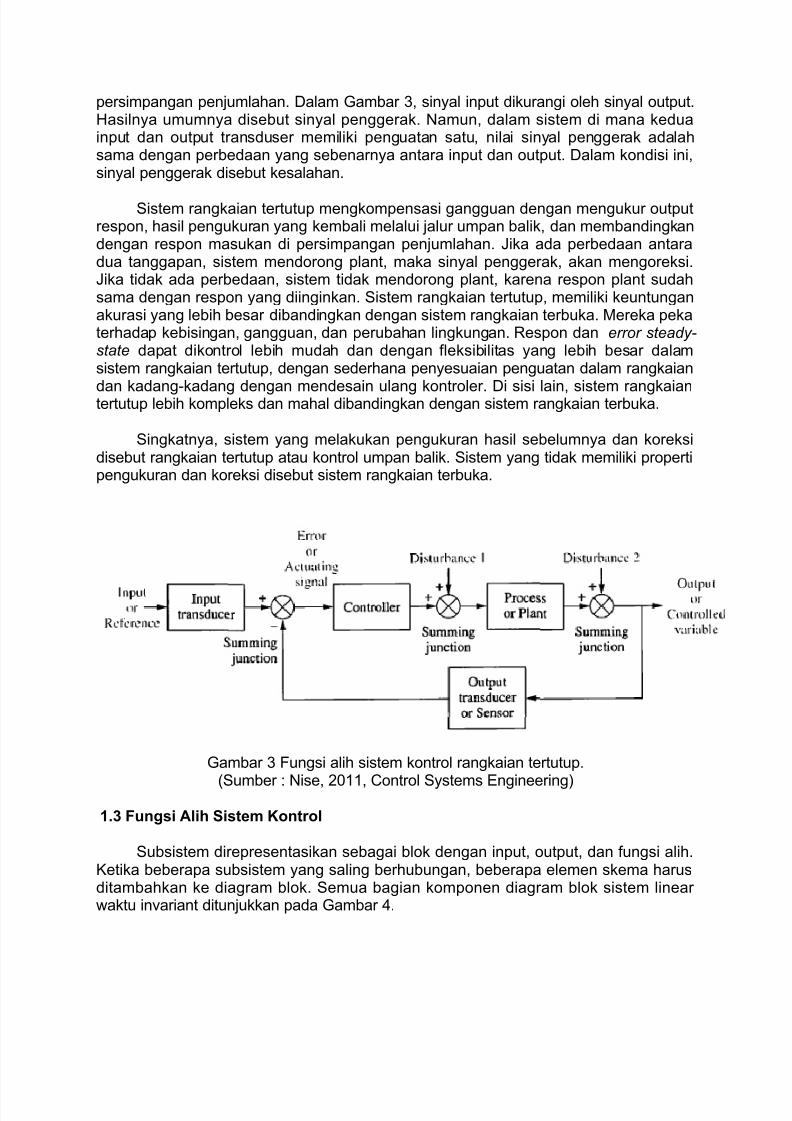
$elemahan dari sistem rangkaian terbuka, yaitu kepekaan terhadap gangguandan ketidakmampuan untuk mengoreksi gangguan ini, dapat diatasi dalam sistemrangkaian tertutup. Arsitektur umum dari sistem rangkaian tertutup ditunjukkan pada&ambar /. Input transduser mengubah bentuk input ke bentuk yang digunakan olehkontroler. %ebuah transduser output, atau sensor, mengukur respon output danmengubahnya menjadi bentuk yang digunakan oleh kontroler. %ebagai #ontoh, jika#ontroller menggunakan sinyal listrik untuk mengoperasikan katup sistem kontrol suhu,kondisi input dan output temperatur diubah menjadi sinyal listrik. $ondisi input dapatdiubah menjadi tegangan oleh potensiometer, resistor )ariabel, dan suhu output dapatdiubah menjadi tegangan oleh thermistor, sebuah perangkat yang hambatan listrikberubah dengan suhu. Pertama penjumlah aljabar menambahkan sinyal dari input kesinyal dari output, yang datang melalui jalur umpan balik, jalur kembali dari output ke
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 3/12
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 4/12
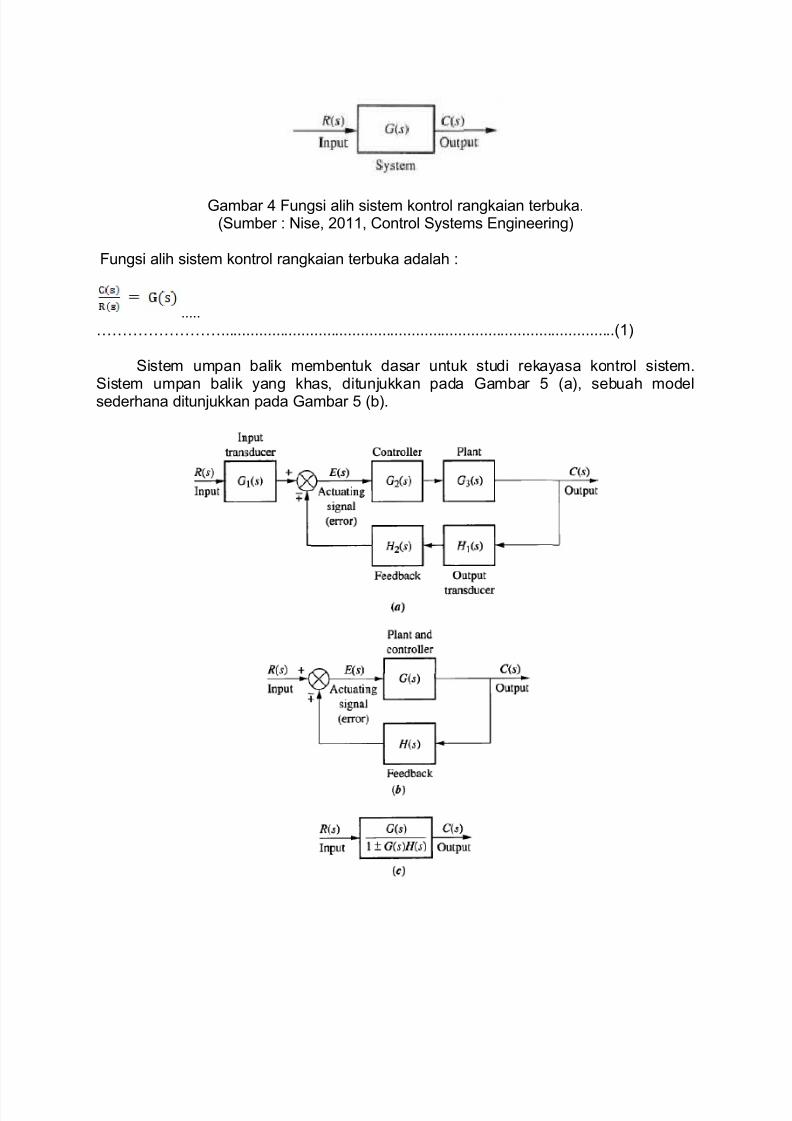
&ambar 4 3ungsi alih sistem kontrol rangkaian terbuka.!%umber : *ise, +'', ontrol %ystems ngineering"
3ungsi alih sistem kontrol rangkaian terbuka adalah :
.....
55555555.............................................................................................!'"
%istem umpan balik membentuk dasar untuk studi rekayasa kontrol sistem.%istem umpan balik yang khas, ditunjukkan pada &ambar 6 !a", sebuah modelsederhana ditunjukkan pada &ambar 6 !b".
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 5/12
&ambar 6 3ungsi alih sistem kontrol rangkaian tertutup.!%umber : *ise, +'', ontrol %ystems ngineering"
............................................................................................................!+"
.............................................................................................................................!/"
3ungsi alih sistem kontrol rangkaian tertutup adalah :
..................................................................................................................!4"
1engarahkan perhatian kita pada model yang disederhanakan, mengganti persamaan!+" dengan persamaan !/" dan peme#ahan untuk fungsi alih, !s"72!s"8&!s", diperolehfungsi alih yang ditunjukkan pada &ambar 6!#", hasil &!s"(!s" dalam persamaan !4"disebut fungsi alih rangkaian terbuka, atau penguat rangkaian.
1.( Mo)el Mate!atika Kece$atan Putaran Motor DC or)e 1
Identifikasi plant ditujukan untuk mendapatkan model matematis berupa fungsi alihyang digunakan untuk proses peran#angan kontroler nantinya. 9ntuk jenis plant yangdibahas berupa motor DC sistem orde satu. rde sistem menentukan jenis kontroler yang akan dipakai dan men#ari nilai parameter kontroler untuk hasil respon yang
diinginkan.
3ungsi alih motor D dapat ditentukan melalui pemba#aan kur)a karakteristik yangdidapatkan melalui pengukuran keluaran ke#epatan putaran motor dan teganganmasukan motor D, seperti yang ditunjukkan pada &ambar .
Tegangan steady state adalah tegangan masukan yang diberikan konstan padamasukan motor D, putaran steady state adalah ke#epatan putaran motor setelahmen#apai putaran nominalnya setelah diberikan tegangan masukan tertentu, sementarawaktu respon motor T' adalah waktu transien yang diperlukan untuk perubahanke#epatan putaran motor men#apai putaran nominalnya.
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 6/12
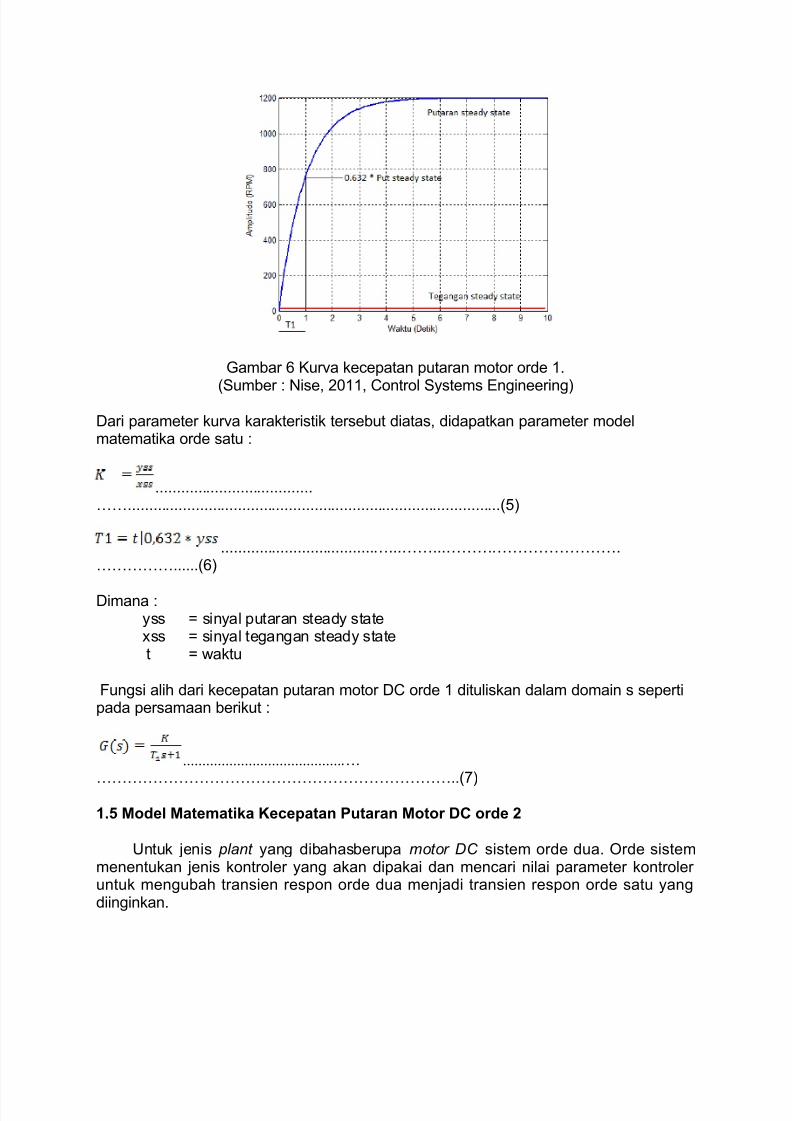
&ambar $ur)a ke#epatan putaran motor orde '.
!%umber : *ise, +'', ontrol %ystems ngineering"
Dari parameter kur)a karakteristik tersebut diatas, didapatkan parameter modelmatematika orde satu :
.....................................55........................................................................................!6"
....................................5...55...55555555555.55555......!"
Dimana :yss 8 sinyal putaran steady state;ss 8 sinyal tegangan steady state t 8 waktu
3ungsi alih dari ke#epatan putaran motor D orde ' dituliskan dalam domain s sepertipada persamaan berikut :
.........................................5.
55555555555555555555555..!<"
1.* Mo)el Mate!atika Kece$atan Putaran Motor DC or)e #
9ntuk jenis plant yang dibahasberupa motor DC sistem orde dua. rde sistemmenentukan jenis kontroler yang akan dipakai dan men#ari nilai parameter kontroler untuk mengubah transien respon orde dua menjadi transien respon orde satu yangdiinginkan.
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 7/12
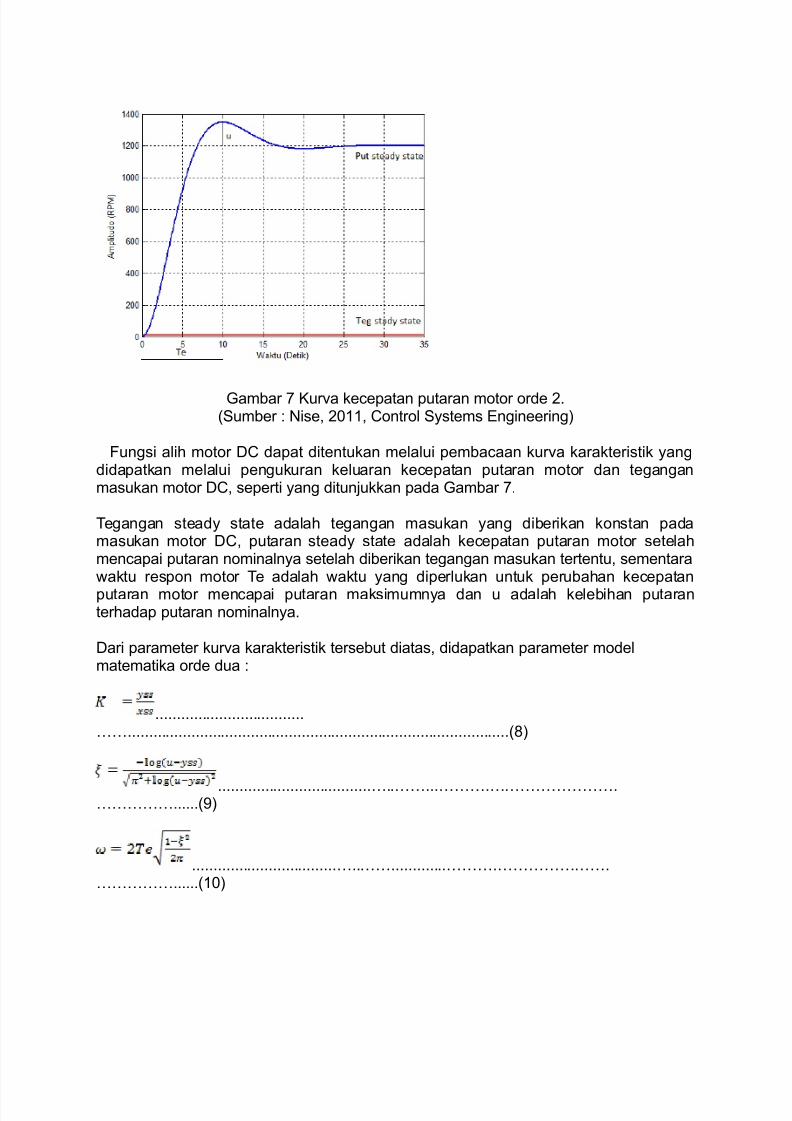
&ambar < $ur)a ke#epatan putaran motor orde +.!%umber : *ise, +'', ontrol %ystems ngineering"
3ungsi alih motor D dapat ditentukan melalui pemba#aan kur)a karakteristik yangdidapatkan melalui pengukuran keluaran ke#epatan putaran motor dan teganganmasukan motor D, seperti yang ditunjukkan pada &ambar <.
Tegangan steady state adalah tegangan masukan yang diberikan konstan padamasukan motor D, putaran steady state adalah ke#epatan putaran motor setelahmen#apai putaran nominalnya setelah diberikan tegangan masukan tertentu, sementarawaktu respon motor Te adalah waktu yang diperlukan untuk perubahan ke#epatan
putaran motor men#apai putaran maksimumnya dan u adalah kelebihan putaranterhadap putaran nominalnya.
Dari parameter kur)a karakteristik tersebut diatas, didapatkan parameter modelmatematika orde dua :
...................................55..........................................................................................!="
....................................5..55...555.55555555.55555......!>"
..................................5..55.............555.5555555.55555......!'"
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 8/12
Dimana :yss 8 sinyal putaran steady state ;ss 8 sinyal tegangan steady state u 8 kelebihan ke#epatan putaran terhadap putaran nominalnya Te 8 ?aktu men#apai ke#epatan putaran maksimum
3ungsi alih dari ke#epatan putaran motor D orde + dituliskan dalam domain s sepertipada persamaan berikut :
..................................55...555555555555555555..5..!''"
1.+ Kontroler PID
$ontroler PID ideal untuk domain waktu kontinyu proses %I% !single input single
output" dinyatakandalam domain @apla#e sebagai berikut :
................................... 55...55555555555555...555...5..!'+"
3ungsi alih kontroler PID :
...................................... 55...55555555555555...5!'/"
.....................................55555555555555..5...5!'4"
Dimana : $p 8 konstanta penguatan proposional Ti 8 konstanta waktu integral Td 8 konstanta waktu deri)atif
0ika Ti 8 dan Td 8 !yaitu kontrol P" , maka jelas bahwa nilai y rangkaiantertutup terukur akan selalu lebih ke#il dari nilai r yang diinginkan !tanpa proses
integrasi, ketika kesalahan positif diperlukan untuk menjaga konstan nilai terukur, dankurang dari nilai yang diinginkan". Pengenalan tindakan integrasi memfasilitasiter#apainya kesesuaian antara nilai terukur dan nilai yang diinginkan, ketika konstantakesalahan menghasilkan output pengontrol meningkat. Pengenalan tindakan deri)atif berarti bahwa perubahan nilai yang diinginkan dapat diantisipasi dan dengan demikiankoreksi yang tepat dapat ditambahkan sebelum perubahan yang sebenarnya.
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 9/12
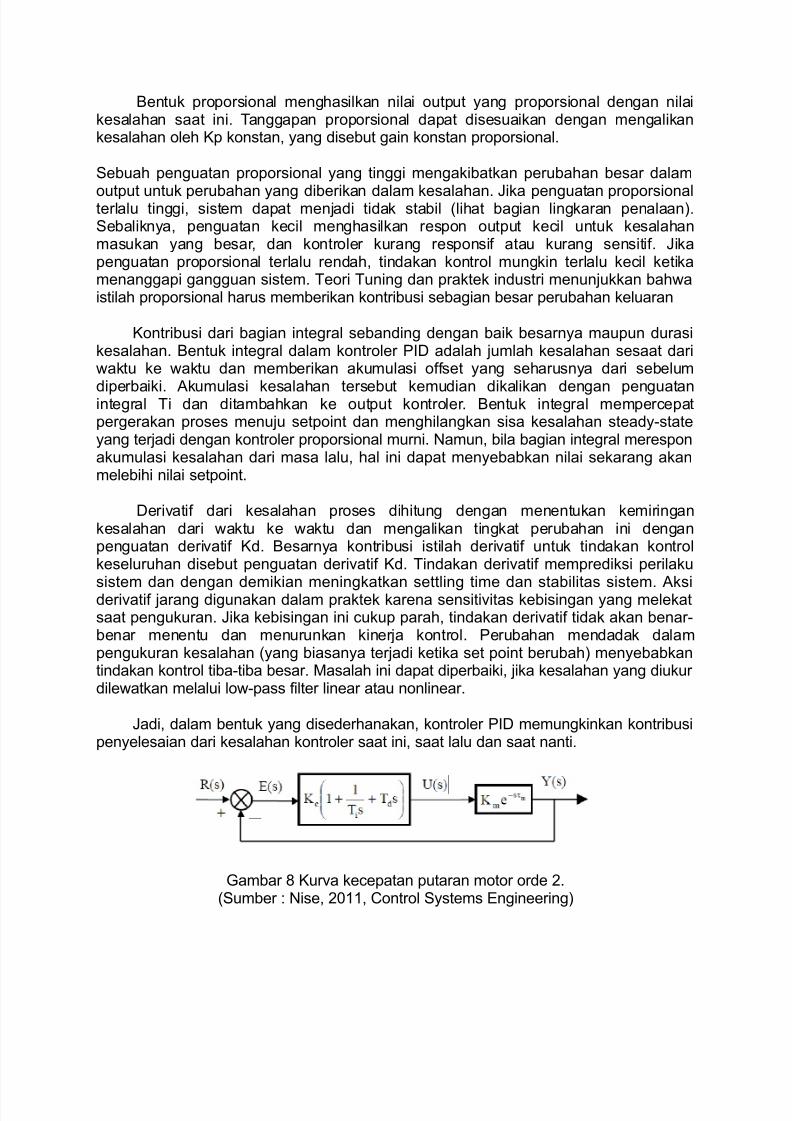
Bentuk proporsional menghasilkan nilai output yang proporsional dengan nilaikesalahan saat ini. Tanggapan proporsional dapat disesuaikan dengan mengalikankesalahan oleh $p konstan, yang disebut gain konstan proporsional.
%ebuah penguatan proporsional yang tinggi mengakibatkan perubahan besar dalam
output untuk perubahan yang diberikan dalam kesalahan. 0ika penguatan proporsionalterlalu tinggi, sistem dapat menjadi tidak stabil !lihat bagian lingkaran penalaan".%ebaliknya, penguatan ke#il menghasilkan respon output ke#il untuk kesalahanmasukan yang besar, dan kontroler kurang responsif atau kurang sensitif. 0ikapenguatan proporsional terlalu rendah, tindakan kontrol mungkin terlalu ke#il ketikamenanggapi gangguan sistem. Teori Tuning dan praktek industri menunjukkan bahwaistilah proporsional harus memberikan kontribusi sebagian besar perubahan keluaran
$ontribusi dari bagian integral sebanding dengan baik besarnya maupun durasikesalahan. Bentuk integral dalam kontroler PID adalah jumlah kesalahan sesaat dariwaktu ke waktu dan memberikan akumulasi offset yang seharusnya dari sebelum
diperbaiki. Akumulasi kesalahan tersebut kemudian dikalikan dengan penguatanintegral Ti dan ditambahkan ke output kontroler. Bentuk integral memper#epatpergerakan proses menuju setpoint dan menghilangkan sisa kesalahan steady-stateyang terjadi dengan kontroler proporsional murni. *amun, bila bagian integral meresponakumulasi kesalahan dari masa lalu, hal ini dapat menyebabkan nilai sekarang akanmelebihi nilai setpoint.
Deri)atif dari kesalahan proses dihitung dengan menentukan kemiringankesalahan dari waktu ke waktu dan mengalikan tingkat perubahan ini denganpenguatan deri)atif $d. Besarnya kontribusi istilah deri)atif untuk tindakan kontrolkeseluruhan disebut penguatan deri)atif $d. Tindakan deri)atif memprediksi perilaku
sistem dan dengan demikian meningkatkan settling time dan stabilitas sistem. Aksideri)atif jarang digunakan dalam praktek karena sensiti)itas kebisingan yang melekatsaat pengukuran. 0ika kebisingan ini #ukup parah, tindakan deri)atif tidak akan benar-benar menentu dan menurunkan kinerja kontrol. Perubahan mendadak dalampengukuran kesalahan !yang biasanya terjadi ketika set point berubah" menyebabkantindakan kontrol tiba-tiba besar. 1asalah ini dapat diperbaiki, jika kesalahan yang diukur dilewatkan melalui low-pass filter linear atau nonlinear.
0adi, dalam bentuk yang disederhanakan, kontroler PID memungkinkan kontribusipenyelesaian dari kesalahan kontroler saat ini, saat lalu dan saat nanti.
&ambar = $ur)a ke#epatan putaran motor orde +.!%umber : *ise, +'', ontrol %ystems ngineering"
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 10/12
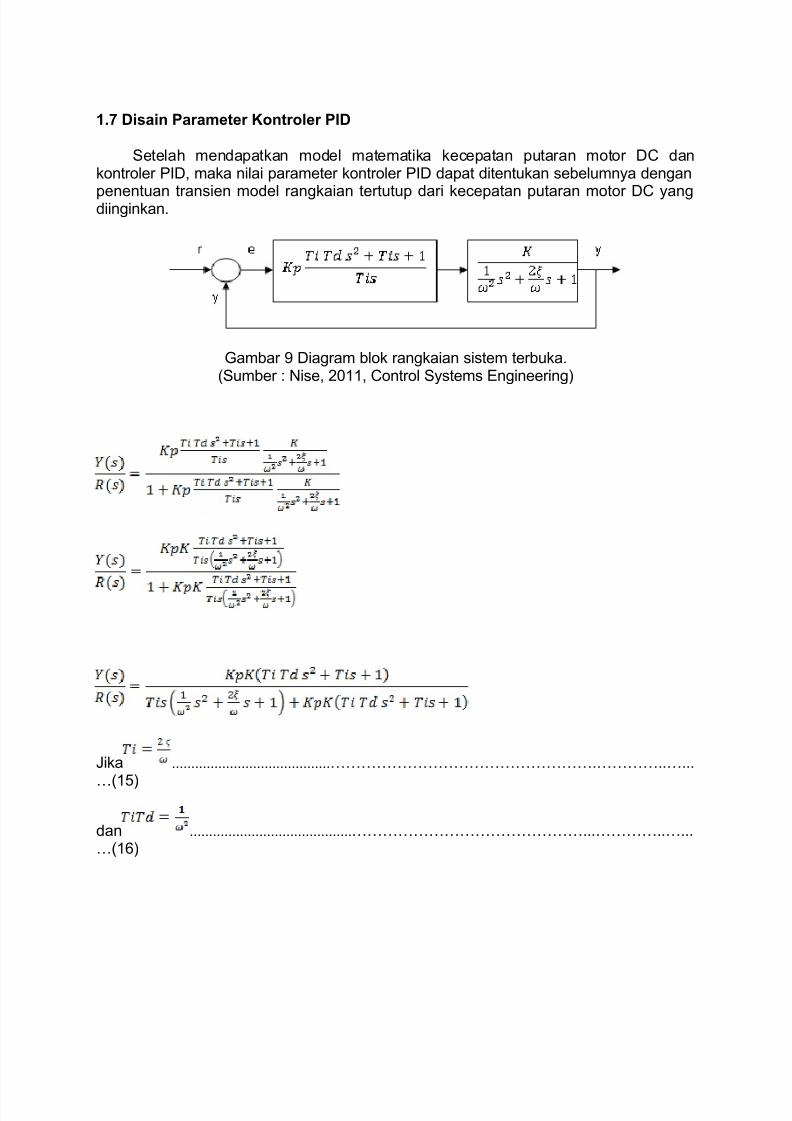
1., Diain Para!eter Kontroler PID
%etelah mendapatkan model matematika ke#epatan putaran motor D dankontroler PID, maka nilai parameter kontroler PID dapat ditentukan sebelumnya dengan
penentuan transien model rangkaian tertutup dari ke#epatan putaran motor D yangdiinginkan.
&ambar > Diagram blok rangkaian sistem terbuka.!%umber : *ise, +'', ontrol %ystems ngineering"
0ika .........................................55555555555555555.5555..5...
5!'6"
dan ..........................................555555555555555...5555..5...5!'"
7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 11/12
maka
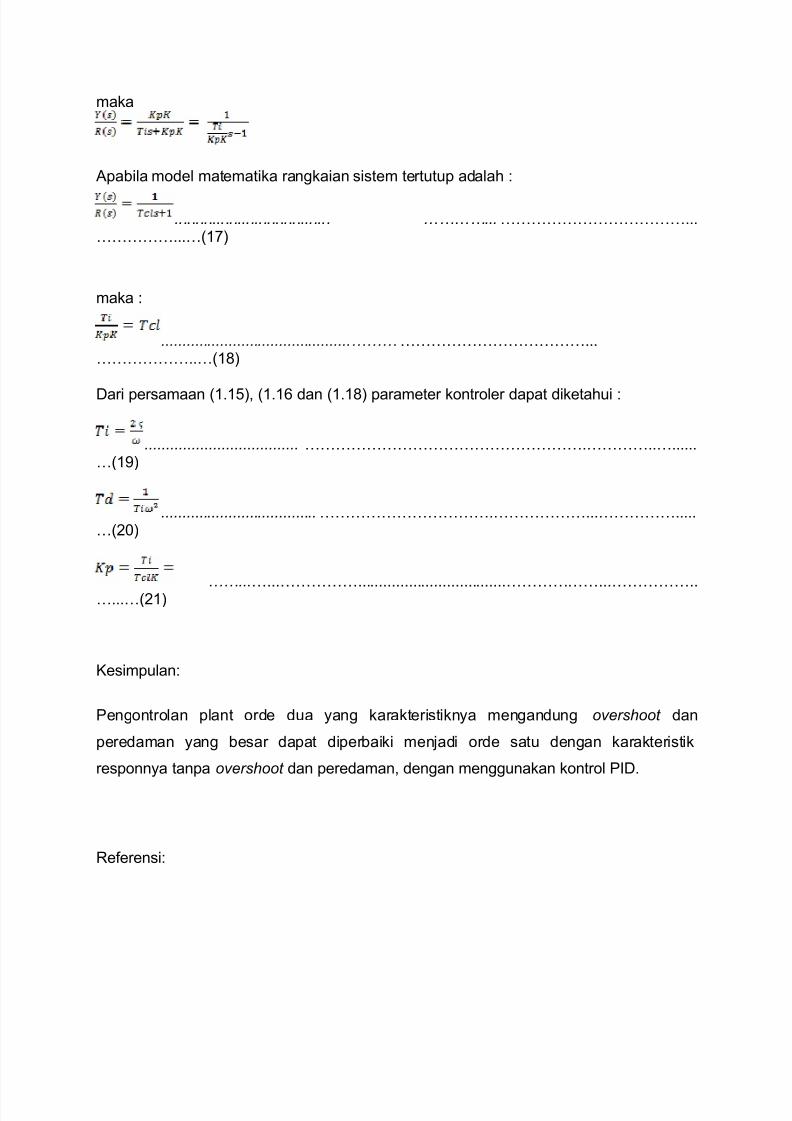
Apabila model matematika rangkaian sistem tertutup adalah :
..................................... …………...555555555555...55555...5!'<"
maka :
.............................................………555555555555...555555..5!'="
Dari persamaan !'.'6", !'.' dan !'.'=" parameter kontroler dapat diketahui :
.................................... 555555555555555555.5555..5......5!'>"
.....................................55555555555.555555...55555.....5!+"
……...5...55555...................................555555...55555..5...5!+'"
$esimpulan:
Pengontrolan plant orde dua yang karakteristiknya mengandung overshoot dan
peredaman yang besar dapat diperbaiki menjadi orde satu dengan karakteristik
responnya tanpa overshoot dan peredaman, dengan menggunakan kontrol PID.
2eferensi:

7/21/2019 Kontrol Pid Kecepatan Putaran Motor Dc
http://slidepdf.com/reader/full/kontrol-pid-kecepatan-putaran-motor-dc 12/12
*orman %. *ise, +'', *T2@ %C%T1% *&I*2I*&, %i;th dition, 0ohn?iley %ons, In# alifornia %tate Polyte#hni# 9ni)ersity, Pomona.