reglamento robo cupjuniorpanamá-rescate2015-v2
TRANSCRIPT
Reglamento de Rescate A – RoboCupJunior Panamá 2015 RoboCupJunior Rescate – Comité Técnico Internacional 2015
• Roberto Bonilla (Mexico) CHAIR, [email protected] • Fredrik Lofgren (Sweden), [email protected] • Naomi Chikuma (Japan), [email protected] • Kai Hannemann (Germany), [email protected] • Phil Wade (Australia), [email protected] • Carlos Amorim (Portugal), [email protected]
Comité Técnico Nacional de Rescate A de RoboCupJunior-Panamá 2015
• Iván Armuelles – Universidad de Panamá, [email protected] • Humberto Rodríguez – Universidad Tecnológica de Panamá,
[email protected] • Leonel González – Universidad Latina de Panamá, [email protected] • César I. Valdés – Universidad Católica Santa María La Antigua, [email protected] • Serafín Blis – SENACYT, [email protected] • Kathia Pittí – SENACYT, [email protected]
Estas son las reglas oficiales para la modalidad Rescate de la RoboCupJunior Panamá 2015. Los cambios en las reglas usadas en 2014 se destacan en rojo. Los cambios incluidos en esta versión 2 están con resaltador verde.
ÍNDICE
ÍNDICE ............................................................................................................................ 2
INTRODUCCIÓN .............................................................................................................. 4
1. ARENA ........................................................................................................................ 4 1.1 Descripción ........................................................................................................................ 5 1.2 Piso ................................................................................................................................... 5 1.3 Línea .................................................................................................................................. 5 1.4 Escombros y Obstáculos .................................................................................................... 6 1.5 Intersecciones .................................................................................................................... 6 1.6 La Puerta ........................................................................................................................... 7 1.7 El Cuarto de Evacuación ..................................................................................................... 7 1.8 Víctimas ............................................................................................................................. 8 1.9 Condiciones Ambientales ................................................................................................... 8
2. ROBOTS ...................................................................................................................... 8 2.1 Control .............................................................................................................................. 8 2.2 Construcción ...................................................................................................................... 9 2.3 Equipo ............................................................................................................................... 9 2.4 Inspección ......................................................................................................................... 9 2.5 Infracciones ..................................................................................................................... 10
3. JUEGO ....................................................................................................................... 10 3.1 Práctica de Pre-‐Ronda ...................................................................................................... 10 3.2 Zona de Juegos ................................................................................................................ 10 3.3 Inicio del Juego ................................................................................................................ 11 3.4 Durante el juego .............................................................................................................. 11 3.5 Puntuación ...................................................................................................................... 12 3.6 Falta de Progreso ............................................................................................................. 13 3.7 Ubicación de la víctima .................................................................................................... 16 3.8 Ubicación del Punto de Evacuación ................................................................................. 16 3.9 Fin de Ronda .................................................................................................................... 17
4. EVALUACIÓN TÉCNICA ABIERTA ................................................................................ 17 4.1 Descripción ...................................................................................................................... 17 4.2 Aspectos a Evaluar ........................................................................................................... 17 4.3 Reconocimientos (premiación) ........................................................................................ 18 4.4 Socialización .................................................................................................................... 18
5. RESOLUCIÓN DE CONFLICTOS .................................................................................... 18 5.1 Árbitro y árbitros asistentes ............................................................................................ 18
5.2 Aclaración de las Reglas ................................................................................................... 19
6. CÓDIGO DE CONDUCTA ............................................................................................. 19 6.1 Juego Justo ..................................................................................................................... 19 6.2 Comportamiento ............................................................................................................. 19 6.3 Mentores ......................................................................................................................... 19 6.4 Ética e Integridad ............................................................................................................. 20 6.5 Compartiendo ................................................................................................................. 20 6.6 El Espíritu ........................................................................................................................ 20
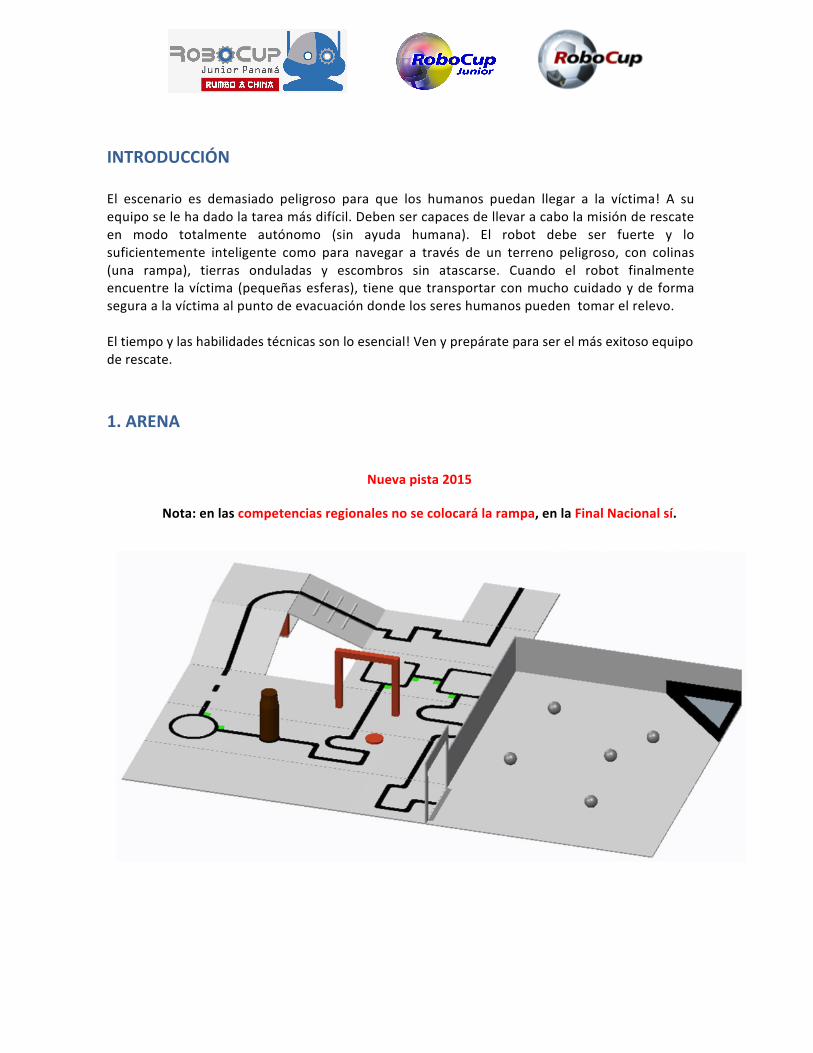
INTRODUCCIÓN El escenario es demasiado peligroso para que los humanos puedan llegar a la víctima! A su equipo se le ha dado la tarea más difícil. Deben ser capaces de llevar a cabo la misión de rescate en modo totalmente autónomo (sin ayuda humana). El robot debe ser fuerte y lo suficientemente inteligente como para navegar a través de un terreno peligroso, con colinas (una rampa), tierras onduladas y escombros sin atascarse. Cuando el robot finalmente encuentre la víctima (pequeñas esferas), tiene que transportar con mucho cuidado y de forma segura a la víctima al punto de evacuación donde los seres humanos pueden tomar el relevo. El tiempo y las habilidades técnicas son lo esencial! Ven y prepárate para ser el más exitoso equipo de rescate.
1. ARENA
Nueva pista 2015
Nota: en las competencias regionales no se colocará la rampa, en la Final Nacional sí.
1.1 Descripción 1.1.1 La arena es modular por baldosas, las cuales pueden ser utilizadas para hacer un sinfín de diferentes caminos para que los robots la atraviesen y también ofrece la posibilidad de añadir nuevas baldosas en el futuro. 1.1.2 La Arena consistirá en baldosas de 300 mm x 300 mm, con patrones diferentes. La selección final de las baldosas y su disposición no será revelada hasta el día de la competición. Las baldosas de competencia pueden ser montadas sobre un material de soporte duro de cualquier espesor. 1.1.3 Habrá un mínimo de 8 baldosas en un campo de competencia. 1.1.4 Existen diferentes diseños de baldosas (ejemplos se pueden encontrar en la sección "1.3 Línea"). 1.1.5 Las baldosas con diferentes niveles están conectadas con una rampa. La rampa no excede una inclinación de 25 grados desde la superficie horizontal.
1.2 Piso 1.2.1 El piso es blanco o cerca de un tono blanco. El piso puede ser liso o de textura (tipo linóleo o alfombra), y puede tener desniveles de hasta 3mm de altura entre las junturas de las baldosas adjuntas. 1.2.2 Los competidores tienen que ser conscientes de que en algunas competencias, las baldosas se pueden montar en soportes gruesos o levantados del suelo con los Bloques de Elevación; lo cual puede hacer que sea difícil volver a una baldosa si el robot se sale. Ninguna ayuda se hará para asistir a los robots que conducen fuera de una baldosa, para que regresen a ésta. 1.2.3 Las baldosas serán utilizadas como rampas para permitir a los robots 'subir' y 'bajar' desde la baldosa elevada. Bloques de elevación deben ser hechos de madera 30 mm x 30 mm pintado en color naranja y colocados en las esquinas de la baldosa. 1.2.4 Los robots, por lo tanto, deben estar diseñados de manera que puedan desplazarse a lo largo de una baldosa que se podrá colocar como base de un “túnel”.
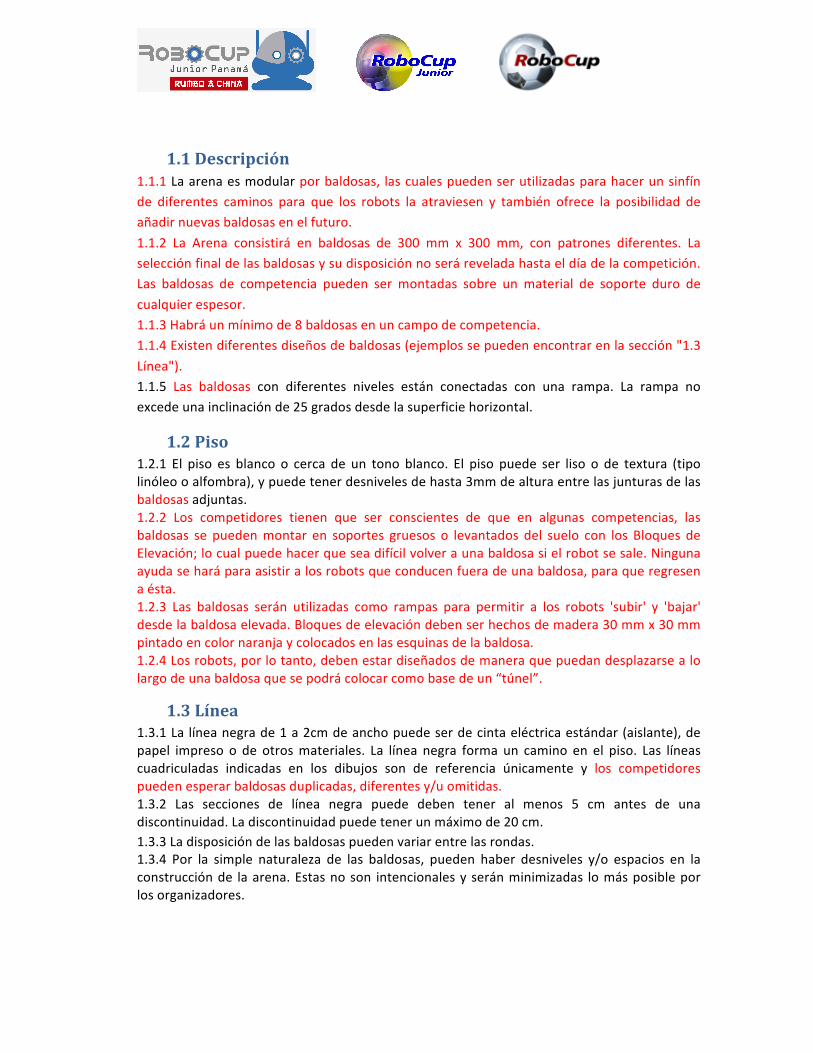
1.3 Línea 1.3.1 La línea negra de 1 a 2cm de ancho puede ser de cinta eléctrica estándar (aislante), de papel impreso o de otros materiales. La línea negra forma un camino en el piso. Las líneas cuadriculadas indicadas en los dibujos son de referencia únicamente y los competidores pueden esperar baldosas duplicadas, diferentes y/u omitidas. 1.3.2 Las secciones de línea negra puede deben tener al menos 5 cm antes de una discontinuidad. La discontinuidad puede tener un máximo de 20 cm. 1.3.3 La disposición de las baldosas pueden variar entre las rondas. 1.3.4 Por la simple naturaleza de las baldosas, pueden haber desniveles y/o espacios en la construcción de la arena. Estas no son intencionales y serán minimizadas lo más posible por los organizadores.
1.4 Resaltes, Escombros y Obstáculos 1.4.1 Los resaltes (policías muertos [speed bumps]) tienen una altura máxima de 1 cm. Ellos son de color blanco y se fijan en el suelo. Ellos pueden estar en ángulo. 1.4.2 Los escombros son de una altura máxima de 3 mm, y no se fijan en el suelo. Son materiales pequeños, tales como palil los de dientes o pequeñas clavijas de madera, etc. 1.4.3 Los escombros pueden estar esparcidos o cerca de las paredes. 1.4.4 Los obstáculos pueden consistir en ladrillos, bloques, pesas y otros artículos pesados, de gran tamaño. 1.4.5 Un obstáculo no ocupa más de una línea. 1.4.6 Se espera que el robot navegue alrededor de los obstáculos. Los obstáculos que son movidos de alguna forma permanecerán donde se muevan, incluso si termina prohibiendo al robot avanzar en su recorrido y solo serán re-‐colocados después que el robot haya terminado su recorrido. Los robots pueden moverse sobre o empujar los escombros. Si usted tiene alguna duda sobre cualquier aspecto del escenario favor consultar en el foro de discusión de la comunidad en línea de RoboCupJunior Panamá: https://groups.google.com/d/forum/robocupjuniorpty
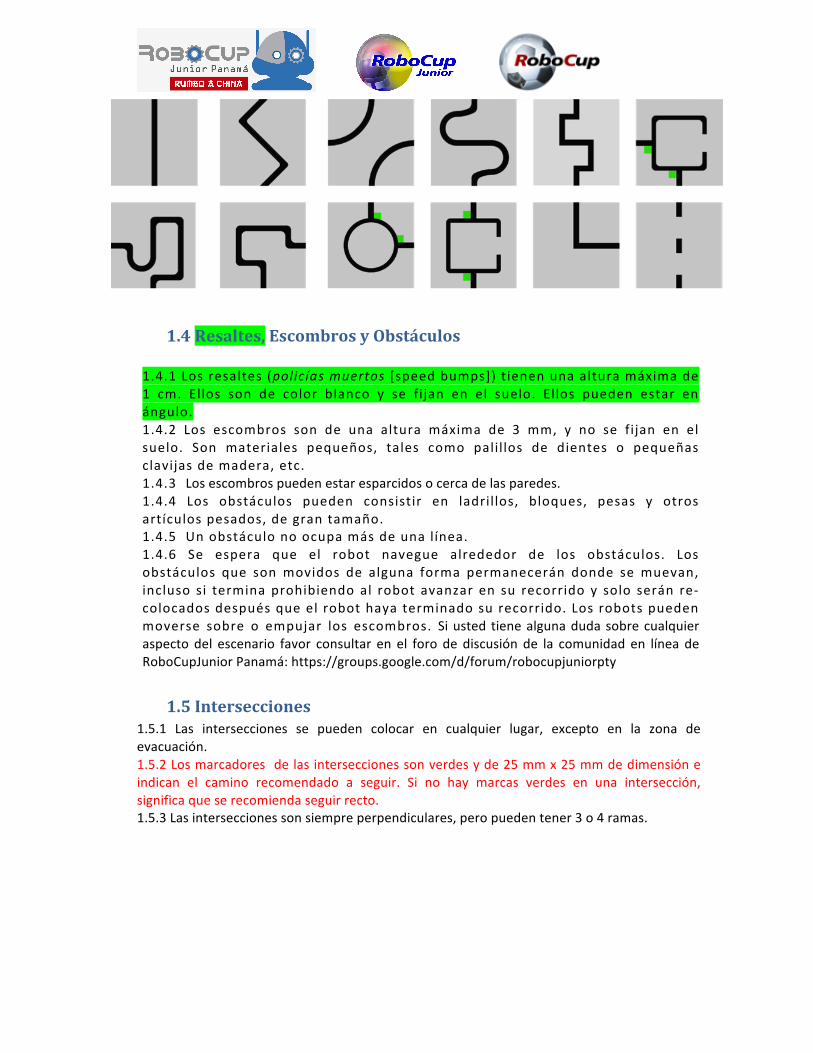
1.5 Intersecciones 1.5.1 Las intersecciones se pueden colocar en cualquier lugar, excepto en la zona de evacuación. 1.5.2 Los marcadores de las intersecciones son verdes y de 25 mm x 25 mm de dimensión e indican el camino recomendado a seguir. Si no hay marcas verdes en una intersección, significa que se recomienda seguir recto. 1.5.3 Las intersecciones son siempre perpendiculares, pero pueden tener 3 o 4 ramas.
1.6 La Puerta 1.6.1 La Puerta consiste en (3) piezas de madera sólida. Todas las piezas deben estar fijadas. Será pintada de color naranja. Debe ser de 250mm de ancho por 250 mm de alto (+/-‐ 20mm). 1.6.2 La puerta se colocará sobre un tramo recto de la línea.
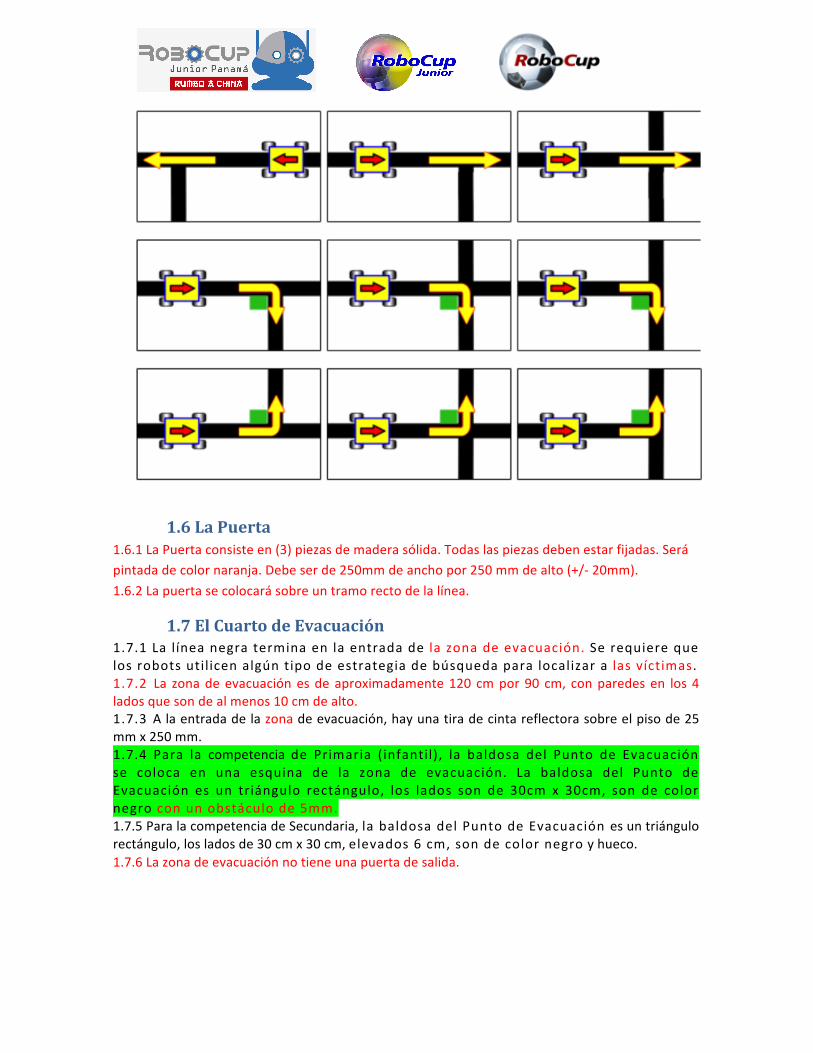
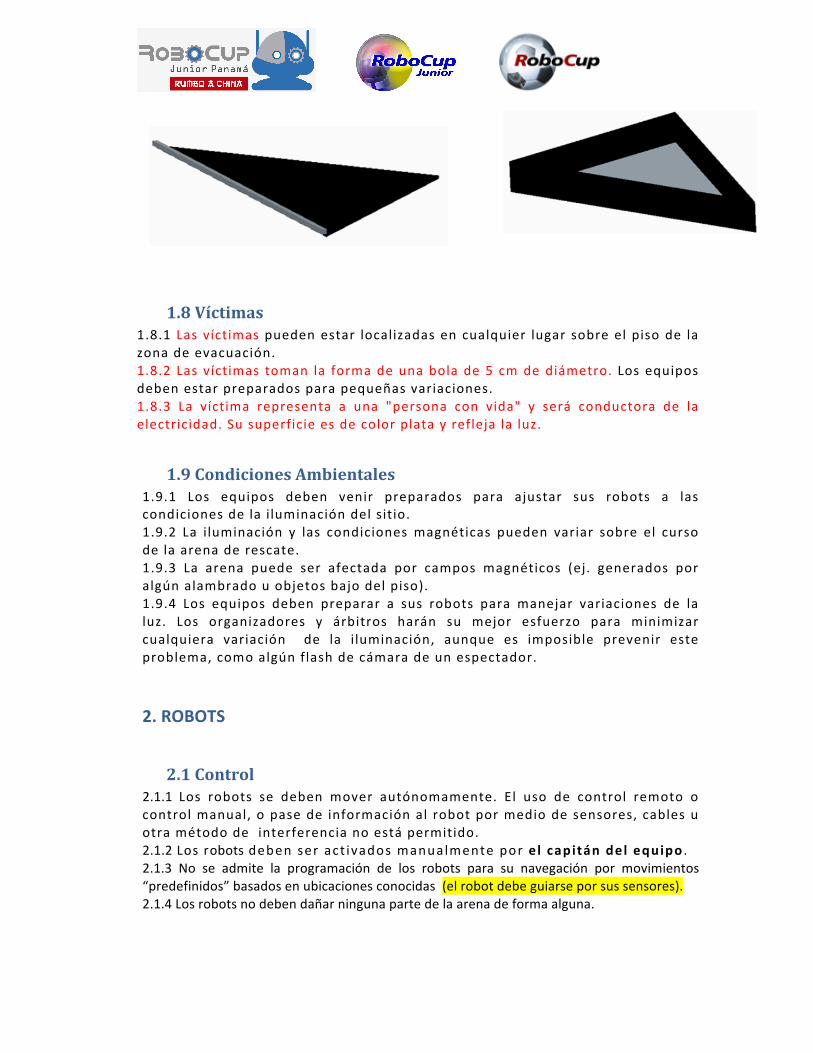
1.7 El Cuarto de Evacuación 1.7.1 La línea negra termina en la entrada de la zona de evacuación. Se requiere que los robots util icen algún tipo de estrategia de búsqueda para localizar a las víctimas. 1.7.2 La zona de evacuación es de aproximadamente 120 cm por 90 cm, con paredes en los 4 lados que son de al menos 10 cm de alto. 1.7.3 A la entrada de la zona de evacuación, hay una tira de cinta reflectora sobre el piso de 25 mm x 250 mm. 1.7.4 Para la competencia de Primaria (infantil), la baldosa del Punto de Evacuación se coloca en una esquina de la zona de evacuación. La baldosa del Punto de Evacuación es un triángulo rectángulo, los lados son de 30cm x 30cm, son de color negro con un obstáculo de 5mm. 1.7.5 Para la competencia de Secundaria, la baldosa del Punto de Evacuación es un triángulo rectángulo, los lados de 30 cm x 30 cm, elevados 6 cm, son de color negro y hueco. 1.7.6 La zona de evacuación no tiene una puerta de salida.
1.8 Víctimas 1.8.1 Las víctimas pueden estar localizadas en cualquier lugar sobre el piso de la zona de evacuación. 1.8.2 Las víctimas toman la forma de una bola de 5 cm de diámetro. Los equipos deben estar preparados para pequeñas variaciones. 1.8.3 La víctima representa a una "persona con vida" y será conductora de la electricidad. Su superficie es de color plata y refleja la luz.
1.9 Condiciones Ambientales 1.9.1 Los equipos deben venir preparados para ajustar sus robots a las condiciones de la iluminación del sitio. 1.9.2 La iluminación y las condiciones magnéticas pueden variar sobre el curso de la arena de rescate. 1.9.3 La arena puede ser afectada por campos magnéticos (ej. generados por algún alambrado u objetos bajo del piso). 1.9.4 Los equipos deben preparar a sus robots para manejar variaciones de la luz. Los organizadores y árbitros harán su mejor esfuerzo para minimizar cualquiera variación de la iluminación, aunque es imposible prevenir este problema, como algún flash de cámara de un espectador.
2. ROBOTS
2.1 Control 2.1.1 Los robots se deben mover autónomamente. El uso de control remoto o control manual, o pase de información al robot por medio de sensores, cables u otra método de interferencia no está permitido. 2.1.2 Los robots deben ser act ivados manualmente por el capitán del equipo . 2.1.3 No se admite la programación de los robots para su navegación por movimientos “predefinidos” basados en ubicaciones conocidas (el robot debe guiarse por sus sensores). 2.1.4 Los robots no deben dañar ninguna parte de la arena de forma alguna.
2.2 Construcción 2.2.1 Cualquier kit de robótica o bloques de construcción que estén disponibles en el mercado o que estén hechos con componentes diseñados por el mismo equipo, pueden ser utilizados, siempre y cuando el diseño y la construcción sean principal y substancialmente trabajo original de los estudiantes (vea sección 2.5. abajo). 2.2.2 Cualquier kit de robot producido comercialmente, específicamente marcado para realizar tareas principales de Rescate, será descalificado. Por ejemplo, sensores pre-‐programados con alguna característica especial para el “seguimiento de línea” o “identificación de obstáculos”, serán descalificados. Si hay cualquier duda, los equipos deberán consultar el Comité Técnico. 2.2.3 Para la seguridad de los participantes y espectadores, no se permite el uso de láseres en cualquier robot. 2.2.4 Comunicaciones con Bluetooth Clase 2, Clase 3 y ZigBee son los únicos tipos de radiocomunicaciones aceptados en RoboCupJunior. Los robots que tienen otro tipo de comunicación radial a bordo deberán ser removidos o des-‐habilitados para evitar posibles interferencias. Los robots que no cumplen pueden ser descalificados inmediatamente del torneo. 2.2.5 El robot debe ser capaz de pasar a través de la puerta sin moverla de su posición original.
2.3 Equipo 2.3.1 Cada equipo debe tener sólo un robot en el campo. El robot debe desempeñarse en tareas de forma 100% autónomas. 2.3.2 Los estudiantes participarán en una (1) de los dos (2) categorías: Rescate Infantil (Primaria) o Rescate Juvenil (Secundaria). 2.3.3 La elegibilidad para cada categoría es:
• Categoría de Rescate Infantil: de 10 a 14 años. Cumplidos al 1 de julio. • Categoría de Rescate Juvenil: de 15 a 19 años. Cumplidos al 1 de julio.
2.3.4 Cada equipo estará compuesto de dos miembros. 2.3.5 Los tutores de los miembros de los equipos no deben estar presentes durante la competencia en la arena. Los miembros del equipo deberán desempeñarse solos durante toda la competencia. 2.3.6 Cada miembro del equipo puede ser registrado en un solo equipo, y cada equipo puede competir en una sola modalidad de RoboCupJunior y categoría.
2.4 Inspección 2.4.1 Los robots serán examinados por un panel de árbitros antes del inicio del torneo, y en otros momentos durante la competencia, para asegurar que mantengan todas las restricciones descritas arriba. 2.4.2 No está permitido utilizar un robot idéntico al utilizado en los años anteriores ni
igual al de otro. El comité técnico de la RoboCupJunior estimula la innovación en cada
competencia.
2.4.3 Es la responsabilidad de los equipos que sus robots sean re-‐inspeccionados cada vez que realicen modificaciones durante el torneo. 2.4.4 A los equipos se les pedirán que expliquen la operación de su robot para verificar que la construcción y programación del mismo sean su propio trabajo. 2.4.5 Se le harán preguntas a los estudiantes sobre sus esfuerzos de preparación, y puede que les soliciten contestar encuestas y participar en entrevistas grabadas en video para propósitos de investigación. 2.4.6 Todos los equipos deben llenar un formulario web que se proporcionará una vez que el equipo se ha registrado oficialmente, y debe ser presentado al menos una semana antes de la competencia. El propósito de este documento es permitir a los jueces estar mejor preparados para las entrevistas. Como ejemplo de la documentación a entregar, por favor, referirse a la documentación de ejemplo Plantilla de Descripción de Materiales de Rescate A en la página oficial https://sites.google.com/site/robocupjuniorpty/ 2.4.7 Todos los equipos tienen que presentar sus códigos de programación antes de la
competición. El código nunca es compartido con otros equipos sin permiso del equipo.
2.5 Infracciones 2.5.1 Cualquier infracción de las reglas de inspección evitará que el robot infractor participe de la competencia, hasta que las modificaciones sean aplicadas. 2.5.2 Aun así, las modificaciones deben ser hechas dentro del tiempo y horario del torneo y los equipos no detendrán el juego durante estas modificaciones. 2.5.3 Si el robot falla en el cumplimiento de todas las especificaciones (aún después de hacer las modificaciones), será descalificado de la ronda (pero no del torneo). 2.5.4 Ningún mentor (tutor) asistirá a los miembros del equipo durante la competencia. Ver la sección 6 del Código de conducta.
3. JUEGO
3.1 Práctica de Pre-‐Ronda 3.1.1 Donde sea posible, los competidores tendrán acceso a prácticas en la arena para la calibración, prueba y afinamiento durante la competencia. 3.1.2 Donde haya arenas dedicadas para competencia y práctica, será a la discreción de los organizadores si las pruebas son permitidas en la arena de la competencia.
3.2 Zona de Juegos
3.2.1 Un área alrededor de los campos de juego será designada como la "zona de juego". 3.2.2 Los equipos deben designar a un solo miembro para que actúe en calidad de
capitán y a quien le será permitido mover el robot, basado en las reglas declaradas y dirigidas por el árbitro. Sólo el capitán tendrá el permiso de mover el robot durante una ronda. 3.2.3 El capitán puede mover el robot sólo cuando se lo ordene el árbitro. 3.2.4 Otros miembros del equipo (y cualquier espectador) en las proximidades de la arena de
rescate tienen que estar por lo menos 150 cm de distancia de la arena (fuera del campo de juego), mientras que el robot este activo, a menos que, de otro modo, lo permita el árbitro. 3.2.5 A nadie se le permitirá tocar las arenas intencionalmente durante la ronda de puntaje.
3.3 Inicio del Juego 3.3.1 La ronda iniciará a la hora asignada aunque el equipo esté o no presente y preparado. Los tiempos serán mostrados alrededor del lugar del evento. 3.3.2. El Disco para la “Baldosa de Verificación”: El Disco para la “Baldosa de Verificación” es la señal que cambia una baldosa común convirtiéndola en una “Baldosa de Verificación”. Se puede hacer de cualquier material de madera o plástico de 5mm a 12 mm de espesor y 70 mm de diámetro. Se pintará en color naranja. 3.3.3 El árbitro le preguntará al capitán si le gustaría nominar baldosa(s) de verificación. Estas baldosas tendrán un disco naranja colocada en una de las esquinas. Una vez que ha comenzado el tiempo (véase 3.3.6), la “Baldosa de Verificación” no se puede cambiar. Nota: Puede haber tantas “Baldosas de Verificación” como el árbitro especifique y pueden ser diferentes para cada ronda. Esto dependerá de las dimensiones de la pista. 3.3.4 El árbitro preguntará al capitán si están contentos con la pista. Después de la confirmación positiva comienza la ronda. 3.3.5 Una vez haya iniciado la ronda, los robots no deberán salir del área de la competencia por ninguna razón. 3.3.6 Los equipos recibirán un tiempo máximo de 8 minutos para calibrar sus robots y completar el recorrido. El tiempo de cada ronda será vigilado por el árbitro. 3.3.7 Por calibración se debe entender como la lectura de las mediciones de los sensores y la modificación de la programación del robot para acomodar las lecturas de los sensores. Cualquier método de pre-‐mapeado de la arena resultará en la descalificación del robot en la ronda. 3.3.8 Los equipos podrán calibrar sus robots en los espacios deseados dentro de la arena, pero el reloj continuará activo. No se permitirá la alimentación eléctrica de los robots durante la calibración. 3.3.9 Una vez los equipos estén listos para realizar un recorrido en la competencia deben notificar al árbitro. Para iniciar el recorrido oficial, el robot es colocado en la baldosa de inicio tal como lo indicará el árbitro. Una vez iniciado el recorrido, no se permitirá más calibración.
3.4 Durante el juego 3.4.1 Los robots empezarán detrás de la unión entre la baldosa de inicio y la baldosa siguiente (o sea, dentro de la primera baldosa) en dirección hacia la zona de evacuación. La correcta colocación será revisada por el Árbitro. 3.4.2 La modificación del robot durante el recorrido no está permitida. Esto incluye volver a colocar partes del robot que se hayan caído. 3.4.3 Todas las partes que se hayan separado del robot de forma accidental o intencional durante el recorrido, deben ser dejadas en el mismo sitio hasta que el robot termine su ronda. No se le permite ni al equipo ni al jurado retirar las partes del robot caídas en la arena hasta finalizar el recorrido o el tiempo límite. 3.4.4 Se les prohíbe a los equipos programar a los robots con información previa sobre el recorrido. El robot debe ir descubriendo el recorrido por su propia cuenta.
3.4.5 El robot debe seguir la línea por completo para entrar en la zona de evacuación. 3.4.6 Siempre que hay múltiples caminos y uno está marcado, el robot puede tomar cualquiera de ellos. Sólo siguiendo las marcas de intersección se le otorgará puntos por la decisión en la intersección.
3.5 Puntuación 3.5.1 Los robots son premiados con puntos por la superación exitosa de cada desafío (líneas discontinuas o ‘gaps’, resaltes o policías muertos ‘speed bumps’, intersecciones y obstáculos). 3.5.2 La superación exitosa está definida por seguir la línea completamente, superar las discontinuidades o gaps, las intersecciones, resaltes o policías muertos ‘speed bumps’, obstáculos, y pasar por una puerta sin interacción humana. 3.5.3 Fracasos en los intentos de superación de los elementos de la arena son definidos como “Falta de Progreso” (vea 3.6.) 3.5.4 Puntos adjudicados por la superación de la “Baldosa de Verificación” exitosamente:
(1er Intento) = 60 pts (2do Intento) = 40 pts (3er Intento) = 20 pts
3.5.5 No hay puntos disponibles para llegar a una ”Baldosa de Verificación" más allá del tercer intento. 3.5.6 Si se utilizan las marcas verdes en las intersecciones, la ruta puede ir en la dirección opuesta del recorrido (regresando por el camino que el robot tomó anteriormente). 3.5.7 Se otorgarán puntos por la superación exitosa de cada línea discontinua (gaps): 10 puntos por línea discontinua superada. 3.5.8 Se otorgarán puntos por la superación exitosa de cada obstáculo que bloquea la línea: 10 puntos por obstáculo. 3.5.9 Se considera que un robot ha superado un obstáculo cuando se ha movido a través de la baldosa donde está ubicado el obstáculo. 3.5.10 Se otorgarán puntos por la superación exitosa de un resalte o policía muerto ‘speed bump’ en una baldosa. 5 puntos por resalte. 3.5.11 Existen puntos disponibles por superar con éxito una baldosa con intersección: 15 puntos por navegar con éxito a través de la baldosa con intersección. Con éxito significa que el robot siguió el camino sugerido. Ver 1.5.2. 3.5.12 Cada línea discontinua, obstáculo, resalte o policía muerto ‘speed bump’ y baldosa con intersección pueden ser evaluado una vez solamente en cada dirección a través del recorrido, no por cada intento a través del mismo. 3.5.13 Víctima rescatada exitosamente: los robots son premiados con puntos por rescatar exitosamente a las víctimas. Un rescate exitoso de la víctima ocurre cuando la víctima se traslada hasta la zona de evacuación (tiene que estar completamente dentro de la zona de evacuación y que ninguna parte del robot esté en contacto con la víctima). 40 puntos por un rescate exitoso de la víctima. 3.5.14 Los empates en la puntuación se resolverán sobre la base del tiempo empleado por cada robot (o equipo de robots) para completar el recorrido (esto incluye el tiempo de calibración). 3.5.15 Visite el sitio web https://sites.google.com/site/robocupjuniorpty/ para obtener la plantilla de hoja de puntuación.
3.6 Falta de Progreso 3.6.1 La falta de progreso se produce cuando:
• El robot debe seguir la línea donde esté presente. Fallar al seguir la línea será considerada una “Falta de Progreso”.
• El robot se atasca en el mismo lugar o pierde la línea negra sin retomarla hasta la próxima baldosa en secuencia (ver figuras abajo).
• El robot se mueve completamente fuera del campo.
3.6.2 El capitán del equipo puede también declarar una Falta de Progreso en cualquier momento si desea (por ejemplo, el robot está en peligro). 3.6.3 Si ocurre una Falta de Progreso, el robot debe colocarse al comienzo de la baldosa de inicio o en la anterior “baldosa de verificación” en dirección a la zona de evacuación, y será verificado por el árbitro.
3.6.4 Sólo el capitán del equipo tendrá permiso para ubicar el robot sin cambios a la programación y/o modificaciones al robot.
Reinicio Encender
y apagar Cambiar la
programación 3.6.5 No hay límite para el número de reinicios dentro de una ronda. 3.6.6 Se le permite al robot proceder a la siguiente “Baldosa de Verificación”, si el robot no llega después del tercer intento.
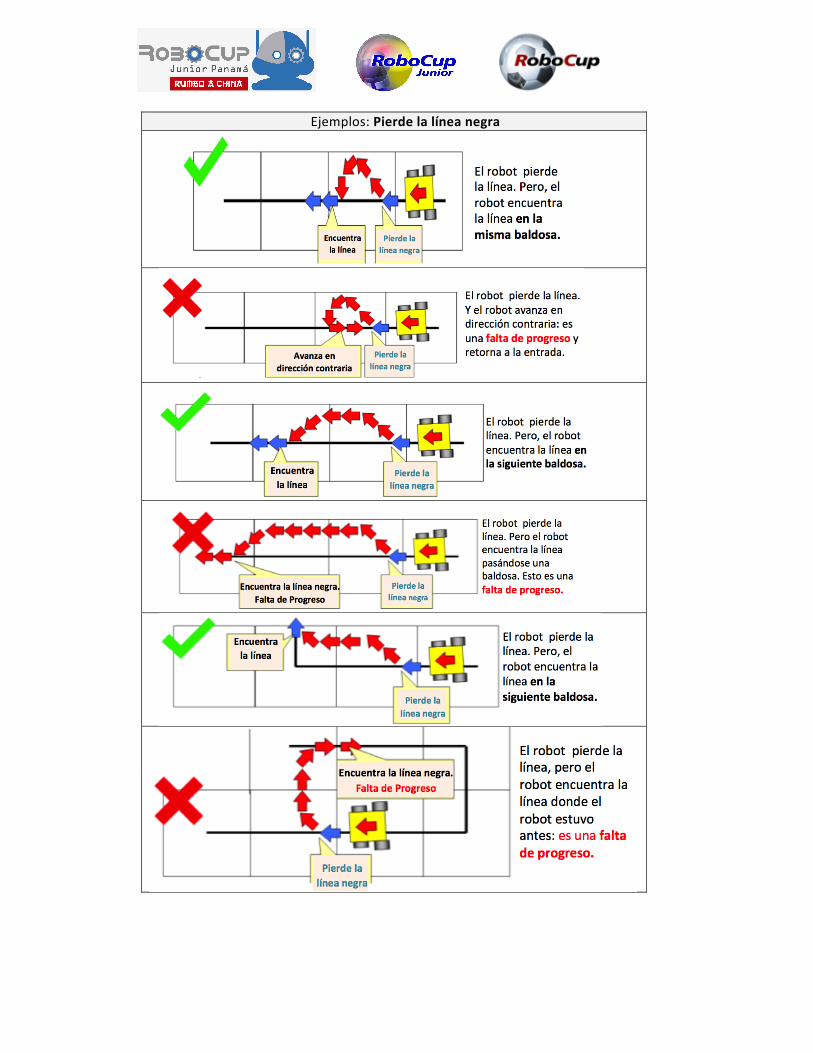
Ejemplos: Pierde la línea negra
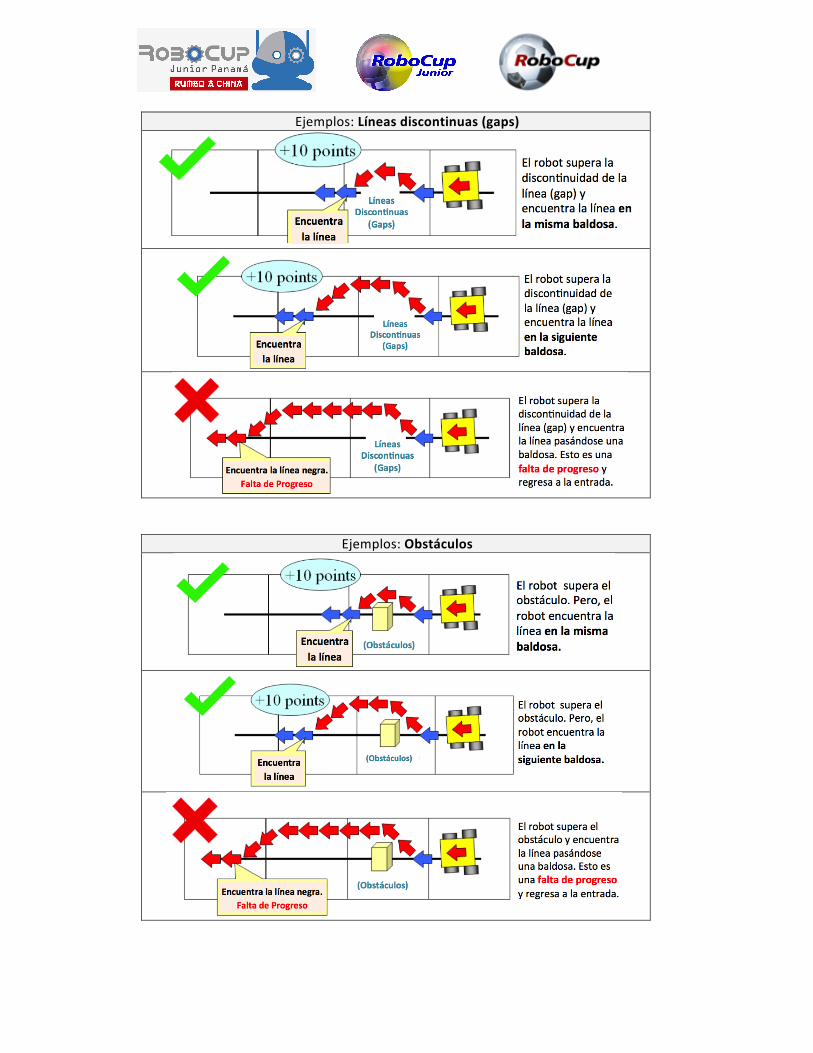
Ejemplos: Líneas discontinuas (gaps)
Ejemplos: Obstáculos
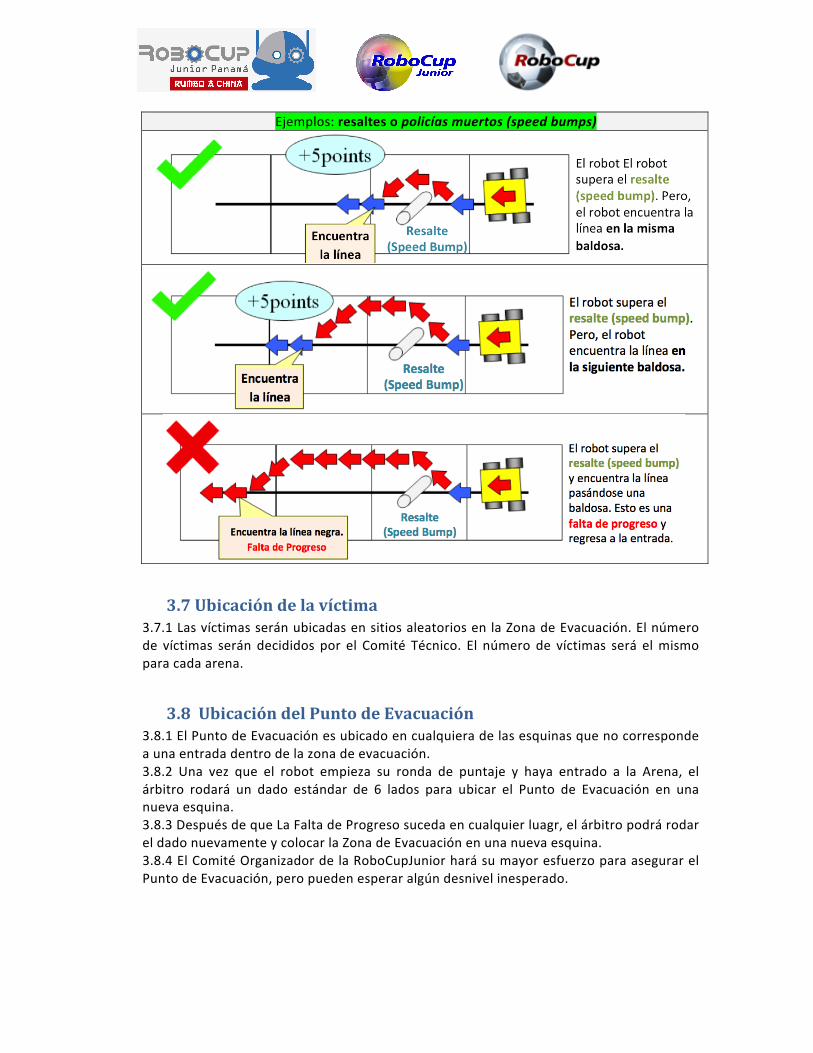
Ejemplos: resaltes o policías muertos (speed bumps)
3.7 Ubicación de la víctima 3.7.1 Las víctimas serán ubicadas en sitios aleatorios en la Zona de Evacuación. El número de víctimas serán decididos por el Comité Técnico. El número de víctimas será el mismo para cada arena.
3.8 Ubicación del Punto de Evacuación 3.8.1 El Punto de Evacuación es ubicado en cualquiera de las esquinas que no corresponde a una entrada dentro de la zona de evacuación. 3.8.2 Una vez que el robot empieza su ronda de puntaje y haya entrado a la Arena, el árbitro rodará un dado estándar de 6 lados para ubicar el Punto de Evacuación en una nueva esquina. 3.8.3 Después de que La Falta de Progreso suceda en cualquier luagr, el árbitro podrá rodar el dado nuevamente y colocar la Zona de Evacuación en una nueva esquina. 3.8.4 El Comité Organizador de la RoboCupJunior hará su mayor esfuerzo para asegurar el Punto de Evacuación, pero pueden esperar algún desnivel inesperado.
3.9 Fin de Ronda 3.9.1 El equipo puede elegir un Fin de Ronda en cualquier momento. En este caso el capitán debe indicar al árbitro el deseo de terminar. El equipo será calificado con todos los puntos recolectados hasta el Fin de Ronda. 3.9.2 La ronda terminará cuando el tiempo expira, cuando el capitán solicita o declara un Fin de Ronda o cuando las víctimas son rescatadas satisfactoriamente.
4. EVALUACIÓN TÉCNICA ABIERTA
4.1 Descripción 4.1.1 La innovación técnica será evaluada durante un marco de tiempo específico (10 minutos). Todos los equipos necesitan preparase para una presentación durante este intervalo de tiempo. Esto será establecido antes del comienzo de las actividades en el campo de la competencia. 4.1.2 Los jueces interactuarán con los equipos, conversando en una atmósfera casual (informal) para hacer preguntas y evaluar las respuestas. 4.1.3 El principal objetivo de la Evaluación Técnica Abierta es hacer énfasis en el Ingenio y la Innovación. Ser innovador puede significar el avance técnico en comparación con el conocimiento existente, o la realización de una solución sencilla, pero fuera de lo común e inteligente para tareas existentes.
4.2 Aspectos a Evaluar 4.2.1 Un sistema de evaluación estándar se centra en:
• Creatividad, • Ingenio, • Originalidad, • Sencillez, • Funcionalidad
4.2.2 “El trabajo del equipo” puede incluir (pero no se debe limitar a) uno de los siguientes aspectos:
• Creación de su propio sensor en lugar de un sensor previamente construido, • Creación de un “módulo de sensor” que comprende varios compuestos
electrónicos para proveer una funcionalidad especial, • Creación de un módulo mecánico que es funcional, pero no es ordinario, • Creación de un nuevo algoritmo (software) para solucionar un problema específico.
4.2.3 Los equipos pueden proveer documentos que expliquen su trabajo. Cada invento debe ser apoyado por una documentación clara y precisa, o sea, los documentos deben mostrar de forma concisa los aspectos innovadores del robot en el documento. 4.2.4 Los documentos deben incluir una bitácora y un póster, y pueden incluir un informe técnico. Se espera que los equipos estén verdaderamente listos para explicar su labor de preparación para la competencia. 4.2.5 La bitácora debería demostrar las mejoras prácticas en el proceso de desarrollo del robot.
4.2.6 El póster debe incluir:
• Identificación de los miembros del equipo con su nombre, la procedencia, etc. • Aspectos importantes como el diseño del hardware y software. También se pueden incluir aspectos adicionales como: • Características inusuales o interesantes del robot; • Imágenes y fotos del equipo preparándose para la competencia, la construcción del
robot, etc.
4.3 Reconocimientos (premiación) 4.3.1 Los reconocimientos (opcional) se dividirán en varias categorías:
• Innovación: o Innovación Mecánica o Innovación Electrónica o Innovación en Programación
• Robustez en el Diseño o Diseño Mecánico o Diseño Electrónico o Diseño de la programación
• Trabajo en equipo: o Demostración de una buena colaboración entre los miembros del
equipo • Mejores prácticas (en el desarrollo):
o Demostración de las mejores prácticas del desarrollo desde el intercambio de ideas, diseño, prototipado, preparación de pruebas, etc.
4.3.2 Los reconocimientos se realizarán mediante certificaciones.
4.4 Socialización 4.4.1 Se anima a los equipos revisar las presentaciones y los poster de los demás participantes. 4.4.2 Se les solicitará a los equipos premiados publicar los documentos y la presentación en la página web de la RoboCupJunior Panamá.
5. RESOLUCIÓN DE CONFLICTOS
5.1 Árbitro y árbitros asistentes 5.1.1 Durante la competencia, las decisiones son tomadas por el árbitro y los asistentes de los árbitros que están a cargo de la Arena, las personas y los objetos alrededor y dentro de ésta. 5.1.2 Durante la ronda, las decisiones tomadas por el árbitro y sus asistentes son definitivas.
5.1.3 Al final de la ronda, el árbitro pedirá al capitán del equipo que firme la hoja de calificaciones (puntuación). El capitán tendrá cerca de 1 minuto para revisar la hoja de calificaciones. Al firmar la hoja, el capitán acepta la puntuación final en representación de todo el equipo; en caso de más aclaraciones, el capitán debe escribir sus comentarios en la hoja de puntuaciones y firmarla.
5.2 Aclaración de las Reglas 5.2.1 Las aclaraciones sobre las reglas pueden ser realizadas por los miembros del Comité Técnico de la RoboCupJunior.
6. CÓDIGO DE CONDUCTA
6.1 Juego Justo 6.1.1 Los robots que causen deliberadamente o repetidos daños a la arena serán descalificados. 6.1.2 Los humanos que causen interferencia deliberada con los robots o que dañen la arena serán descalificados. 6.1.3 Se espera que el objetivo de los equipos será de participar justamente.
6.2 Comportamiento 6.2.1 Los participantes deben tener en cuenta a las otras personas y sus robots cuando se desplacen alrededor del lugar de celebración del torneo. 6.2.2 Los participantes no deben entrar a áreas establecidas para otras ligas u otros equipos a menos que sean expresamente invitados para que ingresen por parte de los miembros del equipo. 6.2.3 Los participantes que presenten mal comportamiento serán invitados a abandonar el evento y correrán con el riesgo que sean descalificados del torneo. 6.2.4 Estas reglas serán aplicadas a discreción por los árbitros, oficiales, organizadores del torneo y las autoridades locales de orden.
6.3 Mentores 6.3.1 Mentores (maestros, padres, chaperones, traductores y cualquier otro miembro adulto) no serán permitidos en el área de trabajo de los estudiantes. 6.3.2 Los organizadores tratarán de proveer suficientes puestos cerca del área de los estudiantes para que los mentores continúen en capacidad de supervisión. 6.3.3 A los mentor no se les permitirá reparar robots o que se involucren en la programación de los robots de sus equipos. 6.3.4 La interferencia del mentor con robots o las decisiones del árbitro, resultará en un llamado de atención en la primera instancia. Si se da la recurrencia de los hechos, el equipo se arriesgará a ser descalificado.
6.4 Ética e Integridad 6.4.1 Los fraudes y el mal comportamiento no serán tolerados. Actos fraudulentos podrán incluir lo siguiente:
a) Los mentores trabajando en el software y hardware de los robots durante la competencia.
b) Equipo de ligas superiores podrán proveer consultaría a los miembros del equipo competidor, pero no debe involucrarse en el trabajo directamente. Por ejemplo, un equipo de la liga juvenil ayuda a arreglar el trabajo del equipo competidor de la liga infantil, arreglar el software o el hardware antes o durante la competencia. Esto puede causar la descalificación del equipo de la liga juvenil (superior). Revisar los "Códigos de Conducta-‐ secciones 6.3.3 y 6.3.5. Esto no solo se aplica a los mentores, sino también a los equipos de las ligas superiores.
6.4.2 La RoboCupJunior se reserva el derecho de revocar el reconocimiento o premiación a un grupo que presente un comportamiento fraudulento después de la ceremonia de premiación. 6.4.3 Si se comprueba que un mentor intencionalmente ha violado los códigos de conducta. y repetidamente modifica y trabaja en el robot del equipo durante la competencia, el mentor será amonestado y excluido de futuras competencias de la RoboCupJunior. 6.4.4 Los equipos que violan los códigos de conducta pueden ser descalificados del torneo. También será posible excluir a un miembro de equipo de las futuras participaciones en el torneo. 6.4.5 En los casos menos severos de violaciones del código de conducta, el equipo recibirá una advertencia. En los casos severos de violaciones de los códigos de conducta, un equipo puede ser descalificado inmediatamente sin recibir ninguna advertencia
6.5 Compartiendo 6.5.1 El espíritu de la RoboCupJunior es que cualquier desarrollo tecnológico y curricular deba ser compartido entre los participantes del torneo. 6.5.2 Cualquier desarrollo puede ser publicado en el sitio web de RoboCupJunior después del evento. 6.5.3 Esto fomenta la misión de RoboCupJunior como una iniciativa en la educación.
6.6 El Espíritu 6.6.1 Se espera que todos los participantes (miembros de equipos y mentores) respeten la misión de la RoboCupJunior. 6.6.2 Los Árbitros y oficiales actuarán dentro del espíritu del evento. 6.6.3 No importa que ganes o pierdas, sino lo mucho que puedas aprender es lo que cuenta!
Reconocimiento – NoComercial – CompartirIgual (by-‐nc-‐sa): No se permite un uso comercial de la obra original ni de las posibles obras derivadas, la distribución de las cuales se debe hacer con
una licencia igual a la que regula la obra original.